Trapezoidal
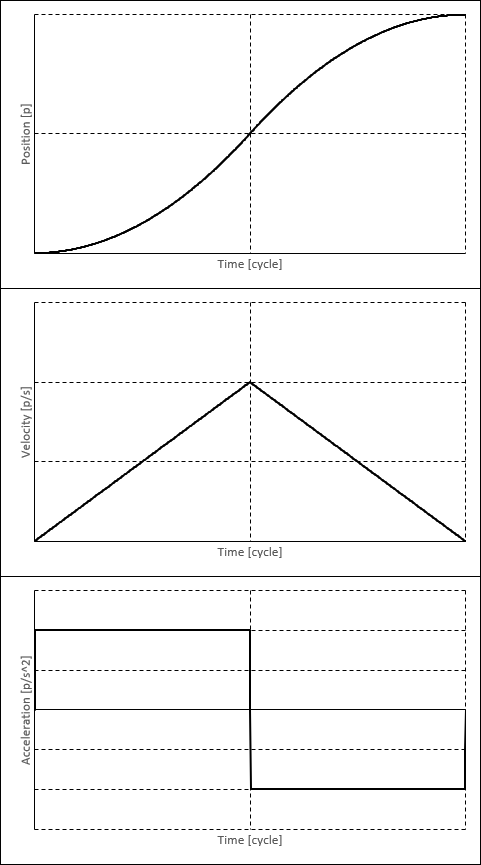
The Trapezoidal profile is one of the most basic profiles. In this profile type, the axis accelerates at the specified constant rate until the profile velocity is reached. At the end of the profile, the axis decelerates at the specified constant rate to stop at the target position.
This profile uses the following profile parameters:
Parameter |
Description |
|---|---|
Maximum velocity |
|
Maximum acceleration |
|
Maximum deceleration |
|
Initial velocity |
|
Final velocity |
The following plots show the position, velocity, and acceleration of a trapezoidal profile.

If the target position is too close to reach the profile velocity with the given acceleration and deceleration, the trapezoidal velocity profile will change to a wedge shape.
The following plots show the position, velocity, and acceleration of a wedge shaped trapezoidal profile.
If the initial velocity and end velocity are specified, the axis will start at the initial velocity, accelerate at a constant rate until the profile velocity is reached, and at the end of the profile, decelerate at a constant rate to reach the target position at the end velocity.
The initial velocity and end velocity cannot be greater than the profile velocity. If an initial velocity or end velocity that is greater than the profile velocity is specified, it will be reduced to equal the profile velocity.
The following position, velocity, and acceleration plots show a trapezoidal profile with nonzero initial and end velocities.

Parameter Adjustment Based on Profile Constraints
Parameters may be adjusted based on profile settings, with their adjustments potentially influenced by other parameters.
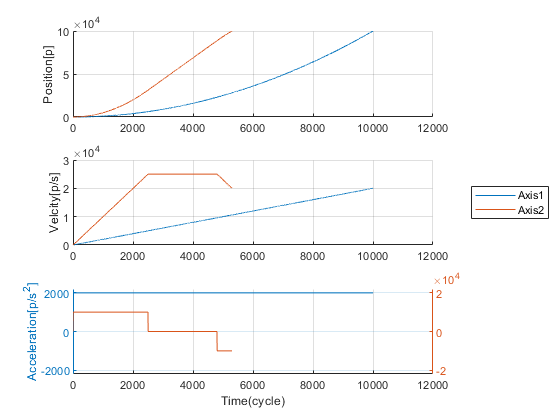
The following example compares motion profiles generated under the same conditions, except for acceleration and deceleration.
Parameters |
Axis1 |
Axis2 |
|---|---|---|
Distance |
100000 |
100000 |
25000 |
25000 |
|
1500 |
10000 |
|
1500 |
10000 |
|
0 |
0 |
|
20000 |
20000 |
With the parameters of Axis1, creating a trapezoidal or wedge-shaped profile is infeasible, leading to the formation of a single acceleration or deceleration profile. Due to the given acceleration of Axis1, achieving the target distance and the end velocity is unattainable, necessitating the readjustment of the acceleration parameter to satisfy both.
In the position command mode, the commanded position always takes precedence over profile parameters. The priority sequence adhered to within trapezoidal profile parameters is as follows:
(Starting Velocity = End Velocity) > (Acc = Dec) > Velocity
If it’s not possible to generate a trapezoidal profile with the given parameters, an attempt is made to adjust the lowest priority Velocity and create a wedge-shaped profile. If a wedge-shaped profile cannot be created, adjustments are made to the next lowest priority, such as Acc or Dec, as illustrated in the example of Axis1 above.