Prevent Catch Up Motion
If the Prevent Catch Up Motion parameter is set to true, the initial offset when pitch error compensation is enabled will not cause the axis to move. Instead of executing a catch up motion, the command position is adjusted so that the compensated command position that is sent to the servo (after applying gear ratio, etc.) does not change.
The following figure shows the change in the command position that occurs when pitch error compensation is enabled when the Prevent Catch Up Motion parameter is set to true.
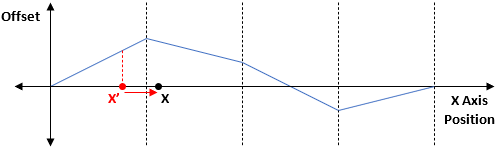
In the above figure, X is the command position before enabling pitch error compensation, and X’ is the command position after enabling pitch error compensation. X’ is calculated so that X’ plus the offset at X’ is equal to X. Therefore, the compensated command position that is sent to the servo does not change when pitch error compensation is started.
For certain pitch error compensation parameters and axis positions, this function may fail to find a command position that does not move the axis. This typically occurs if the pitch compensation values are unusually large and greater than the pitch interval. If a valid command position cannot be found, the command position is not changed and catch up motion is executed to apply the initial offset.