Free Position Mode
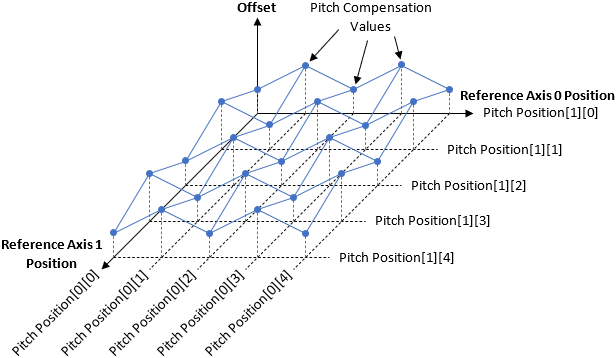
In free position mode, the pitch point positions of each reference axis are specified directly instead of as intervals from the pitch origin position.
To use free position mode, set the two-dimensional pitch error compensation parameters by calling the overloaded Set2DPitchErrorCompensation function with the TwoDPitchErrorCompensationFreePositionData argument.
To read the pitch error compensation parameters of a channel that is using two-dimensional pitch error compensation in free position mode, call the overloaded Get2DPitchErrorCompensation function with the TwoDPitchErrorCompensationFreePositionData argument.
To switch a channel to pitch interval mode, disable two-dimensional pitch error compensation for that channel by calling the Disable2DPitchErrorCompensation function, and then set the two-dimensional pitch error compensation parameters by calling the Set2DPitchErrorCompensation function with the TwoDPitchErrorCompensationData argument.
The pitch positions of each reference axis are specified as absolute positions. Pitch positions are specified in user units.
The following parameters are exclusive to pitch interval mode and are not used in free position mode.
The difference between the largest pitch position and the smallest pitch position of each reference axis must be less than or equal to max2dPitchErrorCompFreePositionRangeMultiplier times the distance between the two closest pitch positions of that reference axis. For example, 1000, 1039, 1040, and 41000 is a valid sequence of pitch positions because the difference between the largest pitch position and the smallest pitch position (41000 - 1000 = 40000) is less than or equal to the max2dPitchErrorCompFreePositionRangeMultiplier (40000) times the distance between the two closest pitch positions (1040 - 1039 = 1). If the difference between the largest pitch position and the smallest pitch position is too large for either reference axis, the PitchPositionRangeTooLarge error will be returned.
The pitch positions of each reference axis must be specified in ascending order. Every pitch position must be greater than the previous pitch position.
All options that can be used for pitch interval mode (excluding options that affect parameters exclusive to pitch interval mode, such as originPositionType) can be used with free position mode. This includes the preventCatchUpMotion option.