Single Turn
Single turn mode can be enabled for an axis with the Single Turn Mode parameter. Enabling single turn mode modifies the axis so that the position wraps around to 0 after Single Turn Encoder Count pulses.
Because the Single Turn Encoder Count parameter is specified in units of pulses, the position in user units that the axis wraps around will be affected by the Gear Ratio. For example, if the Single Turn Encoder Count is set to 10000 pulses and the gear ratio is 2, the axis will wrap around at a position of 5000 user units.
Single turn mode is normally used for rotary axes, whose positions wrap around after each rotation. The Single Turn Encoder Count parameter is typically set to the number of pulses per rotation. Without enabling single turn mode for an axis, the command position and feedback position of an axis will continue to increase if the axis rotates continuously in one direction. If the velocity is high, the command position may become very large and lose precision as a result of the number of significant digits that can be represented by a double floating point type, or the feedback position may reach the maximum range of the Accumulated Encoder Feedback (2^63-1 and -(2^63)) and stop updating. To prevent these issues, single turn mode should be enabled for rotary axes that travel in one direction for a long time.
The following figure illustrates a normal linear axis. The black line is the position axis. The axis can move in either direction along the position axis, as indicated by the red arrow.

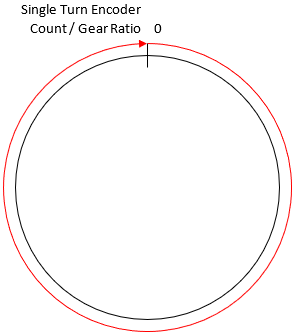
The following figure illustrates a single turn axis. The black circle indicates the position axis. The axis can move in either direction along the position axis and wraps around at [Single Turn Encoder Count / Gear Ratio], as indicated by the red arrow.
Changing the single turn encoder count changes the home position (zero position). To obtain the correct home position, homing must be executed again after changing the single turn encoder count.
Position Commands for Single Turn Axes
For single turn axes, absolute position commands with target positions within the wrap around range will move in the direction that will minimize the distance traveled. Due to this, the axis will move at most half of the wrap around position range.
For example, if the wrap around occurs at position 4000, the starting position is 3000, and the target position is 500, the axis will move +1500 instead of -2500. The following figure illustrates this example. The axis moves along the red path and not the blue path.
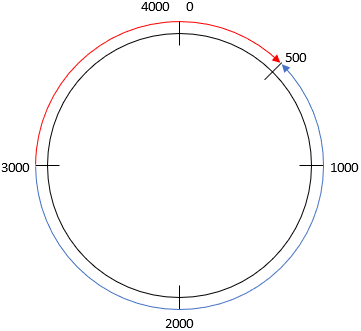
The Single Turn Reduce To Half Turn parameter can be set to FALSE to disable this behavior, and cause the axis to move in the same way as normal linear axes. In this parameter is set to FALSE, the axis will move along the blue path in the above example.
Relative position commands are unaffected, and the axis will always move in the direction of the sign of the relative target position.
Absolute position commands with target positions less than 0 or greater than or equal to the Single Turn Encoder Count are also unaffected. For these absolute position commands, the axis will move in the same way as normal linear axes.
A single turn axis may rotate multiple times around the wrap around range if it execute an absolute or relative position command with a target position that is sufficiently large.
Maximum Velocity for Single Turn Axes
A single turn axis calculates cyclic motion in the same way as an encoder: as the difference in the position from the previous cycle. If the axis is commanded to move at a velocity greater than half the wrap around range per cycle (not per second), the motion will not be calculated correctly. Therefore, the velocity that a single turn axis is commanded must be less than half the wrap around range per cycle.