AL State
EtherCAT slaves can be in Init, PreOp, SafeOp, Op, or Bootstrap states. State changes are typically initiated by requests from the master. The following settings relate to the transitions between these states.
The following figure summarizes the possible transitions between these states.
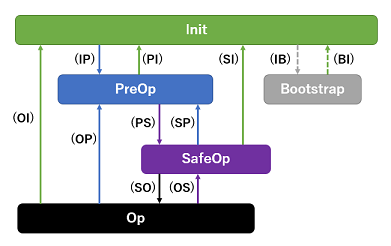
For more information, see “ESC Datasheet Section I - Technology”, Chapter 10.
The following table contains AL state operation related settings.
Name |
Description |
Valid Values |
Default |
|---|---|---|---|
InaccessCount |
The number of consecutive AL status check failures before determining that a slave is inaccessible. |
1-100 |
10 |
Init2PreOpWaitTime |
The maximum wait time for all slaves to transition from Init state to PreOp state. |
>= 500, Unit: ms |
8000 |
PreOp2InitWaitTime |
The maximum wait time for all slaves to transition from PreOp state to Init state. |
>= 500, Unit: ms |
3000 |
PreOp2SafeOpWaitTime |
The maximum wait time for all slaves to transition from PreOp state to SafeOp state. |
>= 500, Unit: ms |
10000 |
SafeOp2PreOpWaitTime |
The maximum wait time for all slaves to transition from SafeOp state to PreOp state. |
>= 500, Unit: ms |
3000 |
SafeOp2OpWaitTime |
The maximum wait time for all slaves to transition from SafeOp state to Op state. |
>= 500, Unit: ms |
5000 |
Op2SafeOpWaitTime |
The maximum wait time for all slaves to transition from Op state to SafeOp state. |
>= 500, Unit: ms |
5000 |
TotalWaitTime |
The maximum total wait time for all slaves to transition from Init state to Op state or Op state to Init state. |
>= 1500, Unit: ms The ratio of init2preop, preop2safeop, and safe2op is 8:10:5. The ratio of preop2init, safeop2preop, and op2safe is 1:1:1. |
23000 for Init to Op. 9000 for Op to Init |
NotWaitAllSlaveOp |
If this function is on, communication will be started successfully even if not all slaves go to the Op state after the wait timeout. Otherwise, communication will fail if any slave is not in Op state after the wait timeout. |
0: Off 1: On |
0 |
InaccessCount:
EcPlatform will check the slave state every cycle. A slave will be considered to be inaccessible after several consecutive AL state checks fail. InaccessCount specifies the number of consecutive AL state check failures. An inaccessible slave is also considered to be an offline slave.
Example:
InaccessCount = 5
Init2PreOpWaitTime, PreOp2InitWaitTime, PreOp2SafeOpWaitTime, SafeOp2PreOpWaitTime, SafeOp2OpWaitTime, Op2SafeOpWaitTime, TotalWaitTime:
Specify the maximum wait time for all slaves to transition from one state to another state. These settings also affect the NotWaitAllSlaveOp setting.
If NotWaitAllSlaveOp is set to 0, if any slave cannot transition to another state in the specified wait time, communication will fail to start and all slaves will transition to init state.
If NotWaitAllSlaveOp is set to 1, EcPlatform will ignore the slaves whose transition is taking more than the specified wait time and go to communication state anyway.
Settings that appear later may override previous settings. If TotalWaitTime is set last, it will override any previously set xx2xxWaitTime settings.
The ratio of init2preop, preop2safeop, and safe2op for TotalWaitTime is 8:10:5. The ratio of preop2init, safeop2preop and op2safe in TotalWaitTime is 1:1:1.
Example:
Init2PreOpWaitTime = 8000
PreOp2InitWaitTime = 3000
PreOp2SafeOpWaitTime = 10000
SafeOp2PreOpWaitTime = 3000
SafeOp2OpWaitTime = 5000
Op2SafeOpWaitTime = 3000
TotalWaitTime = 23000
NotWaitAllSlaveOp:
Specify whether to start communication anyways if a slave cannot transition its state successfully during start communication. If this setting is on, communication will be started successfully even if not all slaves go to Op state after the wait timeout. Otherwise, communication will fail if any slave is not in Op state after the wait timeout.
Example:
NotWaitAllSlaveOp = 1